自动焊接设备的主要构成及特点
2021-08-06 09:10:24
动态详情
自动焊接设备的主要构成及特点:
1、焊接电源。其输出功率和焊接性能需要与所采用的焊接工艺相匹配,并有一个接口与主控芯片相连。
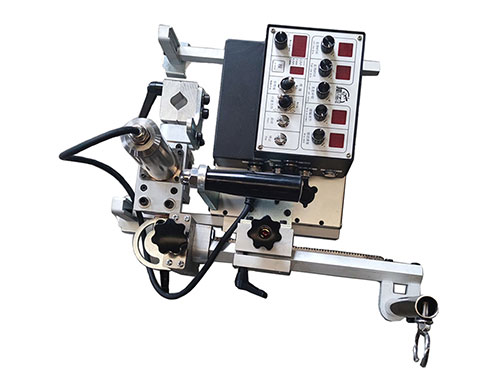
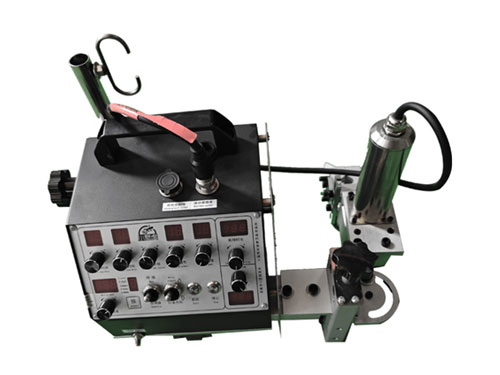
2、送丝机及其控制和调速系统。对速度控制精度要求高的送丝机控制电路应增加速度反馈。CRT运动控制系统的主要特点是效果优良控制和调节速度和模拟电流信号。
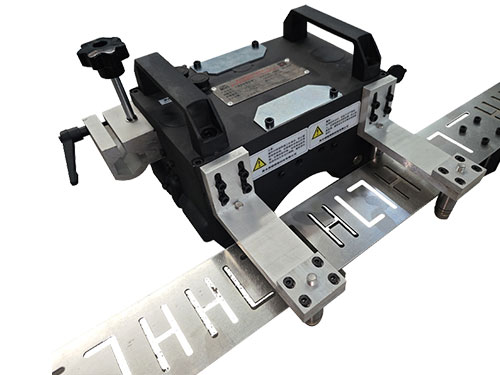
3、焊接头部时使用的移动机构。它由焊头、焊头支撑架、悬挂小车等组成。,并位于细致的焊接头机构中,其传动系统应采用装有编码器的伺服电机。
4、焊件移动或移动机构。比如焊轮架、头尾架翻转机、旋转平台、移位机等。,细致移动位移机构应由伺服电机驱动。
5、焊接夹紧机构。
6、CRT主控制器(CRT运动控制器)。又称系统控制器,主要用于部件间的联动控制、焊接过程的控制、主要焊接参数的设定、调整和显示。如有需要,可以扩展故障诊断、人机对话等控制功能。
7、电脑软件。焊机常用的计算机软件包括编程软件、功能软件、工艺方法软件、专家系统等。
8、焊头导向机构或跟踪机构。自动电弧压力控制器、电弧摆动装置和监控系统。
9、辅助设备。如送丝系统、循环水冷却系统、焊剂回收输送装置、焊丝支架、电缆软管等。