焊接机器人的结构组成
2021-08-06 09:04:39
动态详情
对于机器人焊接,有一个机器人是不够的,还需要配备外围设备。传统的弧焊机器人系统由5个部分组成。
1、机器人本体一般是由伺服电机驱动的六轴铰接机械手,由驱动器、传动机构、机械臂、关节、内部传感器等组成。它的任务是准确地保护机械手端(焊枪)所需要的位置、姿态和轨迹。
2、机器人控制柜是机器人系统的神经 中心,包括计算机硬件、软件和一些特别电路,负责处理机器人工作过程中的所有信息和控制机器人的所有动作。
3、焊接电源系统,包括焊接电源、一对一焊枪等。
4、焊接传感器及系统安然保护设施。
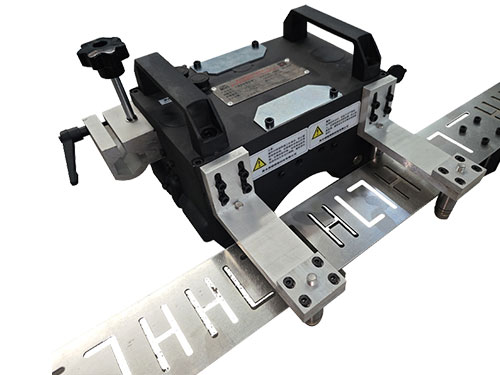
5、焊接夹具。对于批量小、品种多、体积大、的产品,可根据工件焊缝的空间分布,采用简易焊接机器人工作站或与焊接定位器、机器人相结合的机器人工作站。以适应"多品种、小批量"的灵活生产。产品体积小,容易运输、批量和许多规格,焊接过程细分,和生产线结合采用机器人和特别焊接机器,结合模块化的焊接夹具和速度适宜换模技术,从而达到低成本自动化的目的与低投资和效率。